The Delta Router + 4th Axis

Overview
Every year I make a new thing for ORD Camp. This year I made a delta router. The ORD contraptions I make, have one primary function; to spark conversation. This means they have to be interesting, a little whimsical and a little cool looking. They are generally rather small for portability and to keep the costs down. Practicality and suitability are way down the list, so go ahead and snark away. If you do, you are missing the point.
This year there happened to be a session on creativity with constraints. The question we debated for an hour was, do constraints help or hurt the creative process. Constraints can move you out of your comfort zone and maybe that is a big part of creativity. The topic was perfect for me because I had intentionally challenged myself with a few constraints on this project.
- Use non captive stepper motors. Not a lot of people have seen these in use, they are cool to watch and they simplify the design.
- Limit myself to 3 unique fabicated parts. People keep thinking deltas are more complicated than . This was to demonstrate the simplicity. Go ahead, design a Cartesian machine with only 3 unique fabricated parts. All other parts had to be commonly available parts.
- Use stock reprap software. I could only touch the configuration files.
Design
I met all the constraints except for one. I designed a common top and bottom bulkhead, but at machining time I decided it was silly to to spend the time to add holes only used on the top to the bottom and the same with the top. So the four unique fabricated parts are the top, the bottom, the carriages and the end effector. The top and bottom are 3/4 inch Baltic birch. The other fabricated parts are 3mm carbon fiber. All parts were setup and cut in less than 30 minutes on my homemade CNC router. A 3D STEP of my design is here.
Mechanicals
The vertical rails are MakerSlide. I used steel V wheels because I had them laying around. The rest of the mechanical parts are Actobotics parts from Servo City. I thought they were an awesome discovery and then the next day I saw that Sparkfun started to sell them. They really worked out great. My only complaint is that they are imperial thread based parts. I prefer all metric on my designs.
The non captive stepper motors are really cool. The thread is a 2 start 8mm trapoidal, so it moves 4mm per rev. They are quite fast and strong. I custom ordered them at Robot Digg. The only drawback is you cannot move them by hand. You can’t spin the rod or the motor. In this design they are a little vulnerable too. If they get banged hard they could bend.
The linkages are Acrobotics heavy duty ball ends attached to some standoffs I got at McMaster.
Electronics
I used some mini arcade style switches for the limit switches. They are pretty nice snap acting switches, but probably a little less accurate than microswitches. I chose them because they would be super simple to mount without adding mounting brackets.

The controller is my favorite reprap controller; the Azteeg X3.

Spindle
The spindle is a brushless DC hobby motor. It is a Turnigy Trackstar. The speed controller is a Turnigy Plush 30. The shaft is 1/8″. I used a simple shaft coupler to mount the bit. This added a lot of vibration so the motor could not run at full speed, but that was OK becuase the full speed is close to 30,000 RPM and 550Watts!. I eventually manually balanced the coupler and it runs a lot smoother now. I did it by drilling through the existing set screw holes to the other side with a small bit. I enlarged that hole until it was balanced.



4th Axis

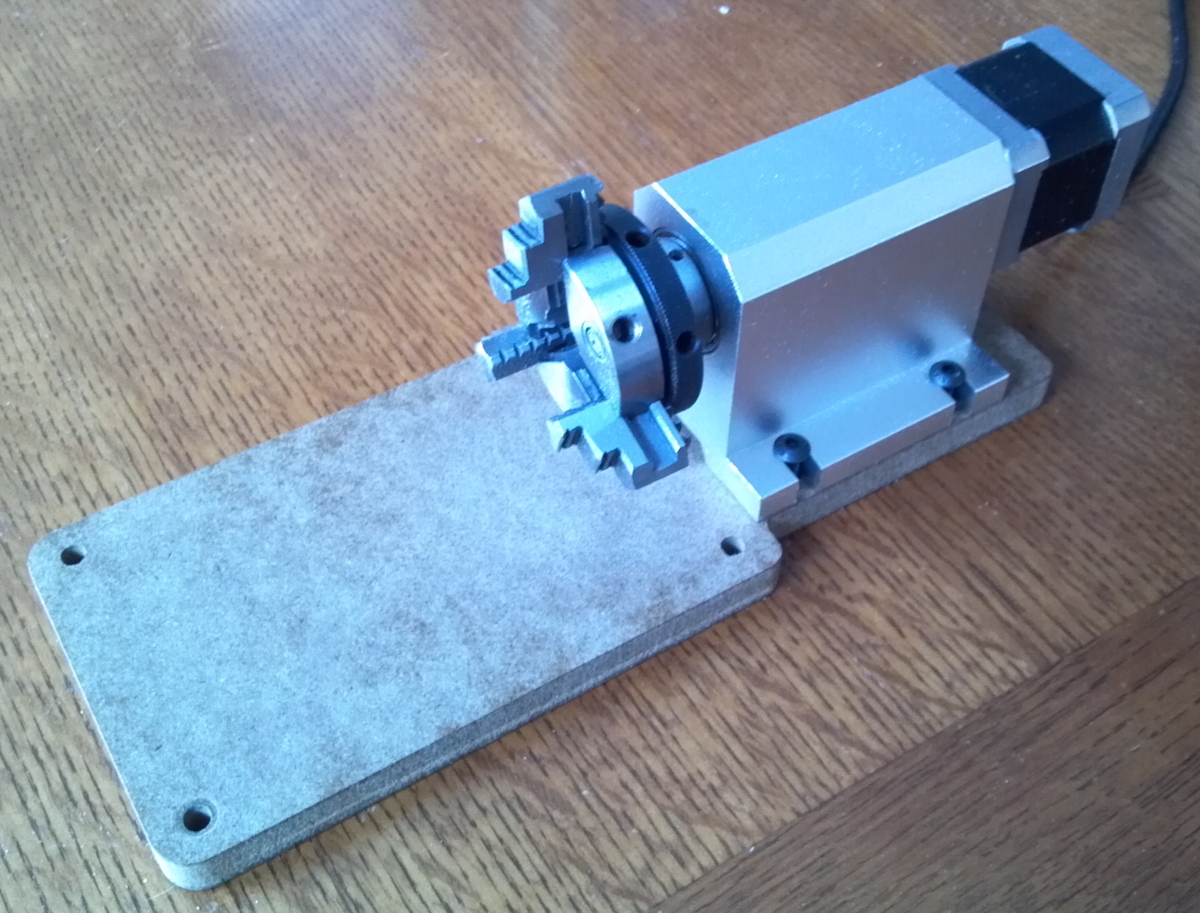
Later when I got home, I thought it would be cool to add a rotary axis to it. The challenge was going to be using the extruder motor logic for the rotary axis. I had this attachment laying around that was bought from eBay a few months ago. A typical 4 axis machine simply disables one of the axes while using the rotary. That is not possible with a delta, so all 4 axes need to run at the same time. It is quite fun to watch.

It was perfect because it was so small. It has a 6:1 reduction gear inside. I made a simple base for it that would allow it to be quickly mounted to the router.
Firmware Changes.
The firmware changes to Repetier were pretty simple. Extruders use millimeters as the feed unit, so I just converted that to degrees. The motor is 200 steps/rev with 16x microstepping plus 6: 1 gear reduction. This yielded 53.333 steps per degree. I changed the safe extruding temperature to a very low value and then just wired a 100k resistor across the thermistor pins so it read a constant value above the safe temperature.
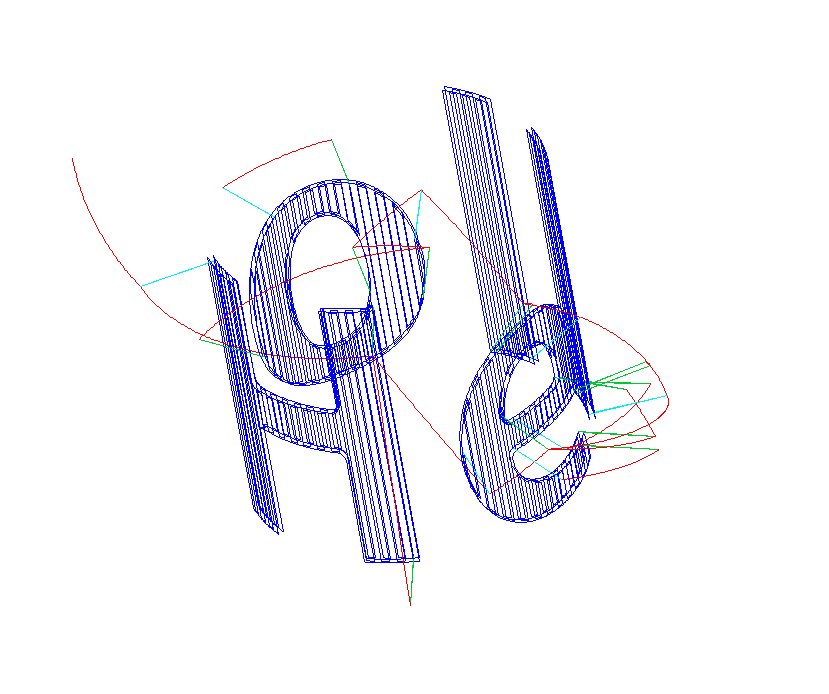
CAM Software
I don’t have any high end CAM software that does anything really cool on a rotary. I did have an evaluation copy of DeskProto, but that timed out. I did have Vectric V Carve that does have a wrapped rotary feature. That would be good enough to do my Hello World project. I had to write a post processor for it. I basically hacked the Mach3 wrapped rotary post processor. I had to make it really simple and tell it convert “A” moves to “E” moves. There were a couple other changes too. The post processor is here.
Changes and Issues
- I really need a tail stock to support the stock and help set up the job level.

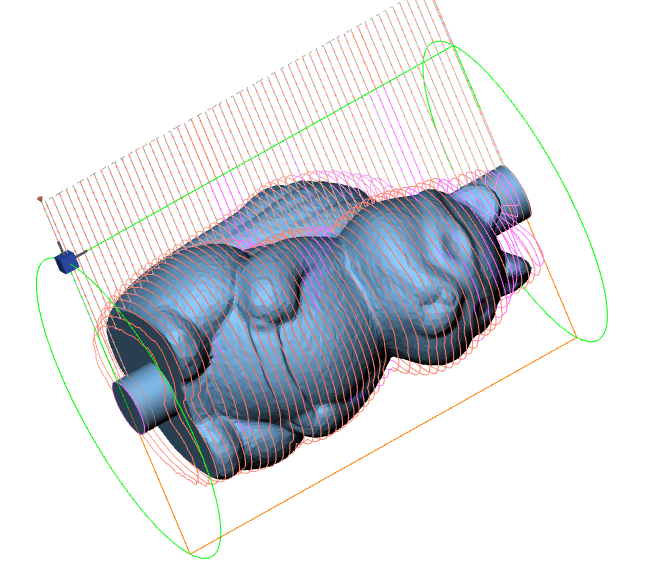
- The feed rate on rotary axes are tricky because millimeters per minute is quite different than degrees per minute and there is no way to deal with that in GCode. The actual feed rate through the material depends on the radius (Z). Programs like Mach3 can compensate for it. I could really hack the firmware or maybe write a post post processor to compensate the speed based on the Z.
- I need to get some real software to some interesting carving with this thing.
First Job Video
Go Deltas!









[…] stood upon the shoulders of the delta 3D printer giants and created this 4 axis delta router. The router was originally created for ORD Camp, an invite only hackers gathering. Each year he […]
[…] stood upon the shoulders of the delta 3D printer giants and created this 4 axis delta router. The router was originally created for ORD Camp, an invite only hackers gathering. Each year […]
Thanks for sharing. I had a few questions if you have the time.
1. I use Repetier Host for my 3d printer and have just started using linuxcnc with a gecko g540 for a cnc machine. Are there any important hints or tips for using the repetier software for cnc milling, or is it rather straightforward with basic knowledge? Or perhaps more precisely, is it rather straightforward if you avoid the rotary axis?
2. Are there any negatives to using the repetier firmware vs a version of grbl?
3. Would those joints be able to allow accurate cutting of clear acrylic at a usable speed?
Thanks again for sharing.
1. Repetier can be tuned for use on routers fairly easily without touching the code. You only need to change settings in configuration.h. If you can figure out LinuxCNC, Reptier should be no more difficult. LinuxCNC is way more powerful that Repetier though.
2. grbl runs on smaller Arduinos, so it is cheaper, but has less features. With that said, grbl is often a little ahead of the others on the motion planning algorithms.
3. This machine is more a novelty and test platform rather than production machine. You would want to make it bigger and probably use IGUS type linkages.
Can I buy the plans???
There is a free link to the design as a 3D step file in the blog post. That is the best I can offer.
You might be able to get rid of one unique part, Inventables sells spindle mount carriage plates that might work for you: https://www.inventables.com/technologies/spindle-mounting-plate
Unfortunately, that did not have the right hole pattern.
BTW: I am the Director of Product Development at Inventables 🙂
We can provide more stepper motors and drive options