will1384's Ord Bot Hadron
will1384's Ord Bot Hadron
![]() by will1384 » Mon Mar 24, 2014 6:48 am
by will1384 » Mon Mar 24, 2014 6:48 am
I had wanted a 3D printer for years, but never had the money, last year I had saved up and got a Shapeoko 2, then I started saving up money and getting the parts to enlarge and upgrade the Shapeoko 2, last month I decided to try 3D printing with the Shapeoko 2, and it went better than expected, I posed about it over in the Shapeoko forums :
http://www.shapeoko.com/forum/viewtopic.php?f=5&t=2501&start=40
After trying 3D printing, I knew wanted a 3D printer, and because I had a lot of parts saved up for the Shapeoko 2 upgrades, I decided to make a Ord Bot.
Here are the parts I started with:
(004x)---NEMA17 Stepper Motor - KL17H248-15-4A ---- automationtechsinc.com
(003x)---Makerslide 330mm ------------------------------ automationtechsinc.com
(001x)---Makerslide 420mm ------------------------------ automationtechsinc.com
(001x)---Z Lift Plate Left and Right --------------------- automationtechsinc.com
(100x)---M3x0.5x4mm Socket Head Cap Screw -------- amazon.com * Had got for the Shapeoko 2.
(100x)---M3x0.5x6mm Socket Head Cap Screw -------- amazon.com * Had got for the Shapeoko 2.
(100x)---M3x0.5x45mm Socket Head Cap Screw ------ amazon.com * Used for Stepper Motor
(100x)---M5X0.80 Hex Lock Nut ------------------------- amazon.com * Had got for the Shapeoko 2.
(100x)---M5x0.8x6mm Button Head Cap Screw --------amazon.com * Had got for the Shapeoko 2.
(100x)---M5x0.8x8mm Button Head Cap Screw --------amazon.com * Had got for the Shapeoko 2.
(025x)---M5x0.8x12mm Button Head Cap Screw -------ebay.com * Had got for the Shapeoko 2.
(025x)---M5x0.8x30mm Button Head Cap Screw ------ ebay.com * Had got for the Shapeoko 2.
(001x)---M8x1.25x1000mm Threaded Rod ------------- ebay.com * I cut two 245mm sections from the 1000mm.
(200X)---Nuts For HFS5 Extrusions - HNKK5-5 --------- us.misumi-ec.com * Had got for the Shapeoko 2.
(001x)---HFS5-2040 1524mm Extrusion ---------------- us.misumi-ec.com * Cut to 370mm, had got for the Shapeoko 2.
(016x)---OpenBuilds Dual V Wheel Kit ----------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(008x)---Eccentric Spacers ------------------------------ openbuildspartstore.com * Had got for the Shapeoko 2.
(002x)---Smooth Idler Pulley Kit ------------------------ openbuildspartstore.com * Had got for the Shapeoko 2.
(004x)---Universal L Brackets - Double ---------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(004x)---Universal L Brackets - Single ----------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(001x)---RioRand Heated set - MK2a, with glass------ amazon.com
(012x)---ACCO Binder Clips, Medium ------------------ amazon.com
(001x)---Ord Bot Hadron Build Plates ------------------ ebay.com
(001x)---RAMPS 1.4 kit, has Mega and drivers -------- ebay.com
(010x)---JST Connectors - M/F Pair - 4 Wire ---------- ebay.com
(008x)---Heatbed Leveling Springs --------------------- ebay.com
(001x)---MBE Extruder v9 - 12v heater ---------------- quintessentialuniversalbuildingdevice.com * Working well with mods.
(010x)---Aluminum Spacers 0.1250 inch -------------- inventables.com * Had got for the Shapeoko 2.
(020x)---Aluminum Spacers 0.2500 inch -------------- inventables.com * Had got for the Shapeoko 2.
(010x)---Aluminum Spacers 0.5000 inch -------------- inventables.com * Used for Stepper Motor, had got for the Shapeoko 2.
(020x)---Aluminum Spacers 1 inch -------------------- inventables.com * Used for Stepper Motor, had got for the Shapeoko 2.
(003x)---Mechanical End Stop v1.2 -------------------- ebay.com
(003x)---2m of GT2 belt with 2 GT2 Pulleys --------- ebay.com * used only about 4 foot, or 1.2 meters, had got for the Shapeoko 2.
I also decided to get this:
(001x)------Full Graphic Smart LCD Controller----------- ebay.com
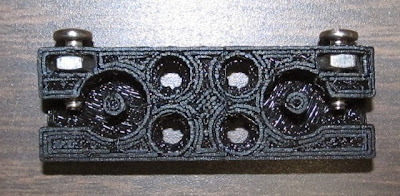
I could not find any belt clamps, or any nut blocks for sale, so I printed some I found on thingiverse, and this forum, I also printed a pair of couplers for the threaded rod.
I printed this Z-Axis coupler:
http://www.thingiverse.com/thing:19858
And the belt clamp I believe came from:
http://www.buildlog.net/forum/viewtopic.php?f=33&t=2157
Or
viewtopic.php?f=33&t=2157
This is what it looks like, I did not have the proper nuts and bolts, so I used a heat gun to soften the plastic and used 6-32 nuts and bolts.
And the nut blocks are from here I think:
https://www.thingiverse.com/thing:69812
I also printed this for my endstops:
Sainsmart / Makerslide X-Axis Mechanical End-stop Mount
https://www.thingiverse.com/thing:220149
Sainsmart / Makerslide Y-Axis mechanical end-stop
https://www.thingiverse.com/thing:231813
Sainsmart / Makerslide Z-Axis Mechanical End-stop Mount
https://www.thingiverse.com/thing:220145
I used OpenBuilds Dual V Wheels and Pulleys in place of Makerslide V Wheels and Pulleys, and it looks like there is no problem in using them, I just used what spacers what came in the "OpenBuilds kit", seems to work just fine, I also used GT2 belt and Pulleys.
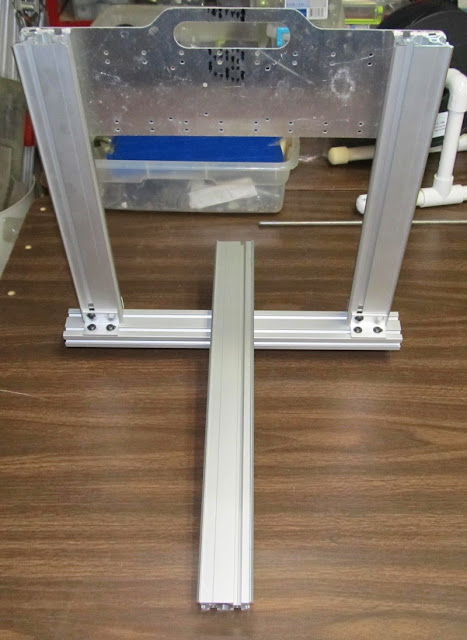
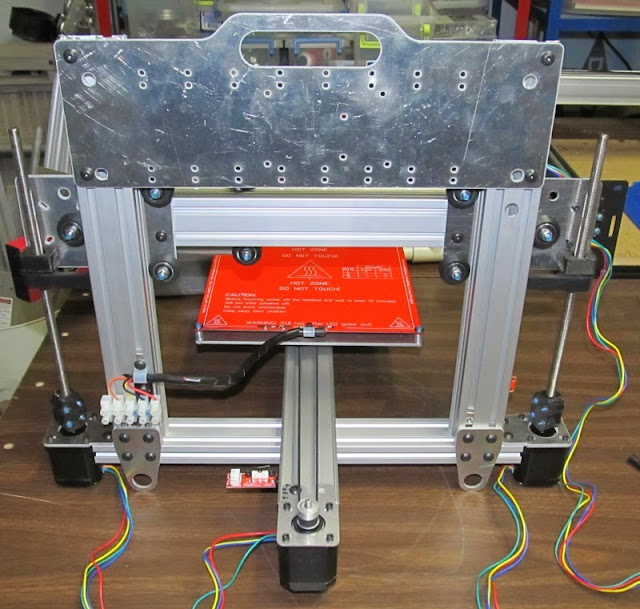
Images for the frame build:
LOL, I got one of the Makerslide rails upside down, but I don’t think its going to cause any problems.


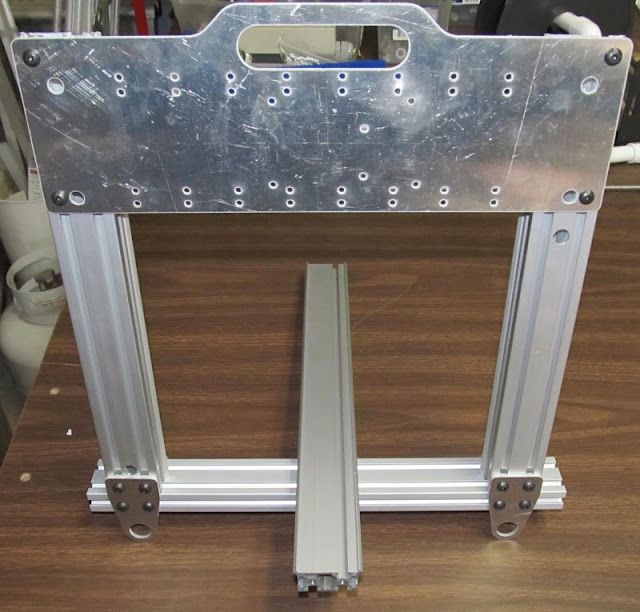
I had reversed the Makerslide when I drilled, so I made two holes.
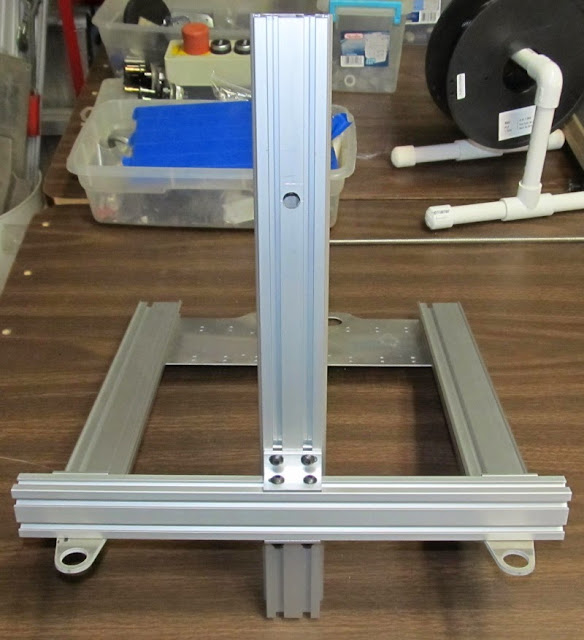
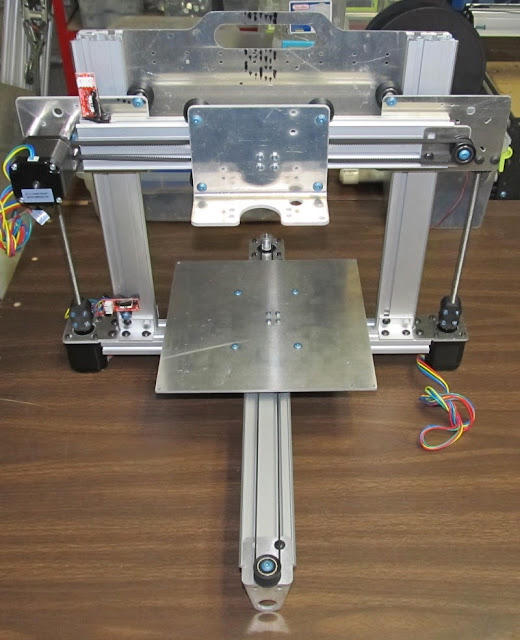
I am trying to figure out my wiring strategy, at first I wanted to use the holes, but I tend to redo and change stuff a lot, so I thought that using the holes might lead to problems later.
That's all I have done so far, I still need to setup Ramps, and program the Arduino Mega, I am not even sure were to start on the Arduino Mega, I am trying to figure out the Configuration.h stuff now.
From what I understand I need set this,
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2560,97.24160448}
I used this calculator
http://calculator.josefprusa.cz/#steppers
the settings are for GT2 belts and pulleys, and I did the extruder calibration with Mach3 and got 48.62080224 at 1/8 stepping, so at 1/16 it should be 97.24160448, I think.
Here is a helpful page on extruder calibration:
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
Still trying to figure out the end stop settings, and LCD setting for the Full Graphic Smart LCD Controller, and then how to use the Configuration.h, LOL
http://www.shapeoko.com/forum/viewtopic.php?f=5&t=2501&start=40
After trying 3D printing, I knew wanted a 3D printer, and because I had a lot of parts saved up for the Shapeoko 2 upgrades, I decided to make a Ord Bot.
Here are the parts I started with:
(004x)---NEMA17 Stepper Motor - KL17H248-15-4A ---- automationtechsinc.com
(003x)---Makerslide 330mm ------------------------------ automationtechsinc.com
(001x)---Makerslide 420mm ------------------------------ automationtechsinc.com
(001x)---Z Lift Plate Left and Right --------------------- automationtechsinc.com
(100x)---M3x0.5x4mm Socket Head Cap Screw -------- amazon.com * Had got for the Shapeoko 2.
(100x)---M3x0.5x6mm Socket Head Cap Screw -------- amazon.com * Had got for the Shapeoko 2.
(100x)---M3x0.5x45mm Socket Head Cap Screw ------ amazon.com * Used for Stepper Motor
(100x)---M5X0.80 Hex Lock Nut ------------------------- amazon.com * Had got for the Shapeoko 2.
(100x)---M5x0.8x6mm Button Head Cap Screw --------amazon.com * Had got for the Shapeoko 2.
(100x)---M5x0.8x8mm Button Head Cap Screw --------amazon.com * Had got for the Shapeoko 2.
(025x)---M5x0.8x12mm Button Head Cap Screw -------ebay.com * Had got for the Shapeoko 2.
(025x)---M5x0.8x30mm Button Head Cap Screw ------ ebay.com * Had got for the Shapeoko 2.
(001x)---M8x1.25x1000mm Threaded Rod ------------- ebay.com * I cut two 245mm sections from the 1000mm.
(200X)---Nuts For HFS5 Extrusions - HNKK5-5 --------- us.misumi-ec.com * Had got for the Shapeoko 2.
(001x)---HFS5-2040 1524mm Extrusion ---------------- us.misumi-ec.com * Cut to 370mm, had got for the Shapeoko 2.
(016x)---OpenBuilds Dual V Wheel Kit ----------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(008x)---Eccentric Spacers ------------------------------ openbuildspartstore.com * Had got for the Shapeoko 2.
(002x)---Smooth Idler Pulley Kit ------------------------ openbuildspartstore.com * Had got for the Shapeoko 2.
(004x)---Universal L Brackets - Double ---------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(004x)---Universal L Brackets - Single ----------------- openbuildspartstore.com * Had got for the Shapeoko 2.
(001x)---RioRand Heated set - MK2a, with glass------ amazon.com
(012x)---ACCO Binder Clips, Medium ------------------ amazon.com
(001x)---Ord Bot Hadron Build Plates ------------------ ebay.com
(001x)---RAMPS 1.4 kit, has Mega and drivers -------- ebay.com
(010x)---JST Connectors - M/F Pair - 4 Wire ---------- ebay.com
(008x)---Heatbed Leveling Springs --------------------- ebay.com
(001x)---MBE Extruder v9 - 12v heater ---------------- quintessentialuniversalbuildingdevice.com * Working well with mods.
(010x)---Aluminum Spacers 0.1250 inch -------------- inventables.com * Had got for the Shapeoko 2.
(020x)---Aluminum Spacers 0.2500 inch -------------- inventables.com * Had got for the Shapeoko 2.
(010x)---Aluminum Spacers 0.5000 inch -------------- inventables.com * Used for Stepper Motor, had got for the Shapeoko 2.
(020x)---Aluminum Spacers 1 inch -------------------- inventables.com * Used for Stepper Motor, had got for the Shapeoko 2.
(003x)---Mechanical End Stop v1.2 -------------------- ebay.com
(003x)---2m of GT2 belt with 2 GT2 Pulleys --------- ebay.com * used only about 4 foot, or 1.2 meters, had got for the Shapeoko 2.
I also decided to get this:
(001x)------Full Graphic Smart LCD Controller----------- ebay.com
I could not find any belt clamps, or any nut blocks for sale, so I printed some I found on thingiverse, and this forum, I also printed a pair of couplers for the threaded rod.
I printed this Z-Axis coupler:
http://www.thingiverse.com/thing:19858
And the belt clamp I believe came from:
http://www.buildlog.net/forum/viewtopic.php?f=33&t=2157
Or
viewtopic.php?f=33&t=2157
This is what it looks like, I did not have the proper nuts and bolts, so I used a heat gun to soften the plastic and used 6-32 nuts and bolts.
And the nut blocks are from here I think:
https://www.thingiverse.com/thing:69812
I also printed this for my endstops:
Sainsmart / Makerslide X-Axis Mechanical End-stop Mount
https://www.thingiverse.com/thing:220149
Sainsmart / Makerslide Y-Axis mechanical end-stop
https://www.thingiverse.com/thing:231813
Sainsmart / Makerslide Z-Axis Mechanical End-stop Mount
https://www.thingiverse.com/thing:220145
I used OpenBuilds Dual V Wheels and Pulleys in place of Makerslide V Wheels and Pulleys, and it looks like there is no problem in using them, I just used what spacers what came in the "OpenBuilds kit", seems to work just fine, I also used GT2 belt and Pulleys.
Images for the frame build:
LOL, I got one of the Makerslide rails upside down, but I don’t think its going to cause any problems.
I had reversed the Makerslide when I drilled, so I made two holes.
I am trying to figure out my wiring strategy, at first I wanted to use the holes, but I tend to redo and change stuff a lot, so I thought that using the holes might lead to problems later.
That's all I have done so far, I still need to setup Ramps, and program the Arduino Mega, I am not even sure were to start on the Arduino Mega, I am trying to figure out the Configuration.h stuff now.
From what I understand I need set this,
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2560,97.24160448}
I used this calculator
http://calculator.josefprusa.cz/#steppers
the settings are for GT2 belts and pulleys, and I did the extruder calibration with Mach3 and got 48.62080224 at 1/8 stepping, so at 1/16 it should be 97.24160448, I think.
Here is a helpful page on extruder calibration:
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
Still trying to figure out the end stop settings, and LCD setting for the Full Graphic Smart LCD Controller, and then how to use the Configuration.h, LOL
Last edited by will1384 on Sat Mar 29, 2014 2:00 pm, edited 1 time in total.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Mon Mar 24, 2014 7:55 pm
by will1384 » Mon Mar 24, 2014 7:55 pm
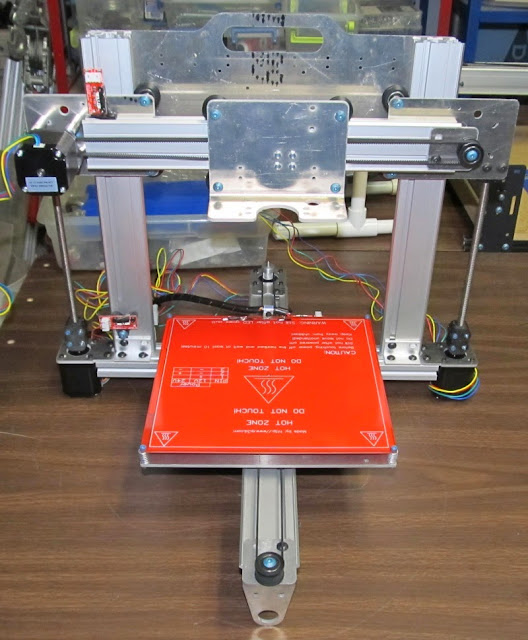
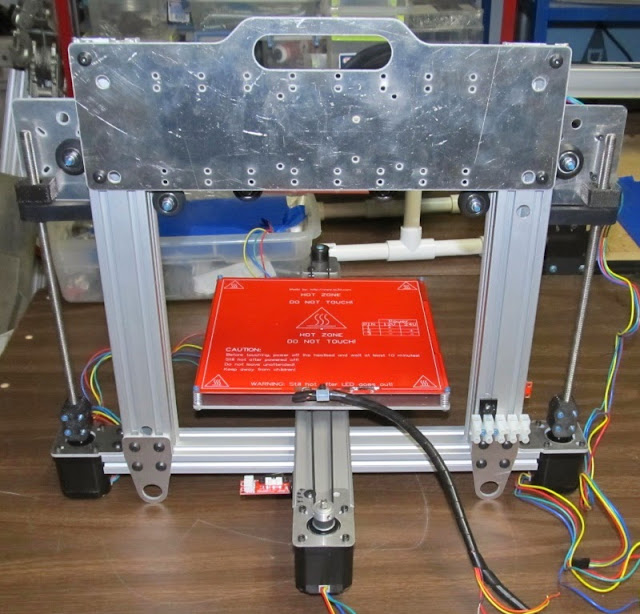
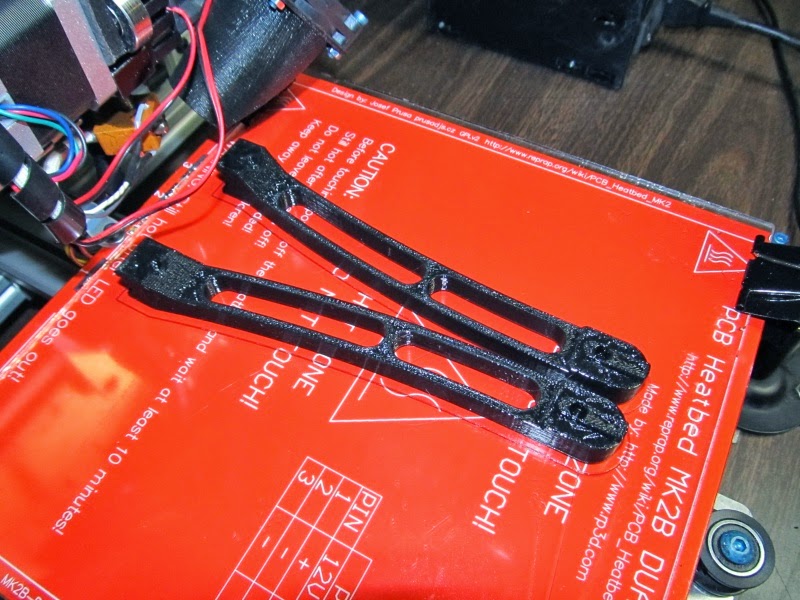
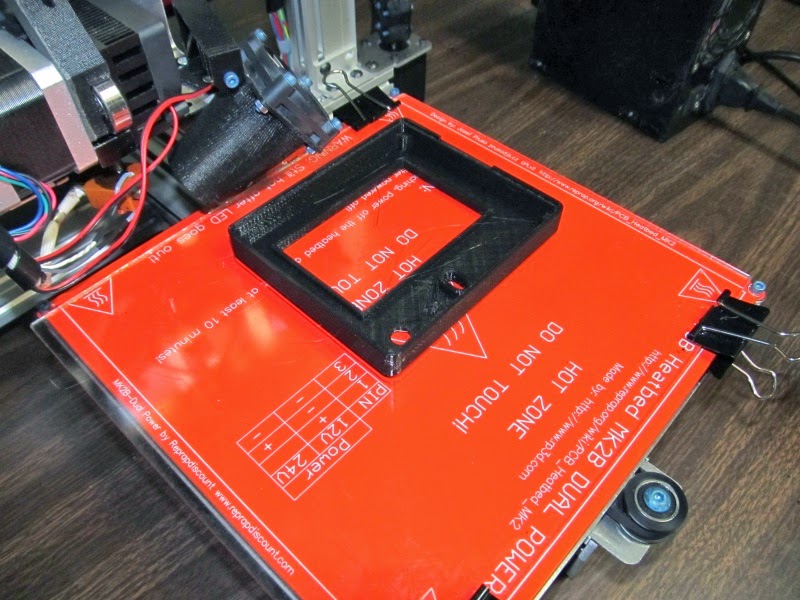
Some images of my heatbed.
I decided on using the heatbed with the traces pointing down.
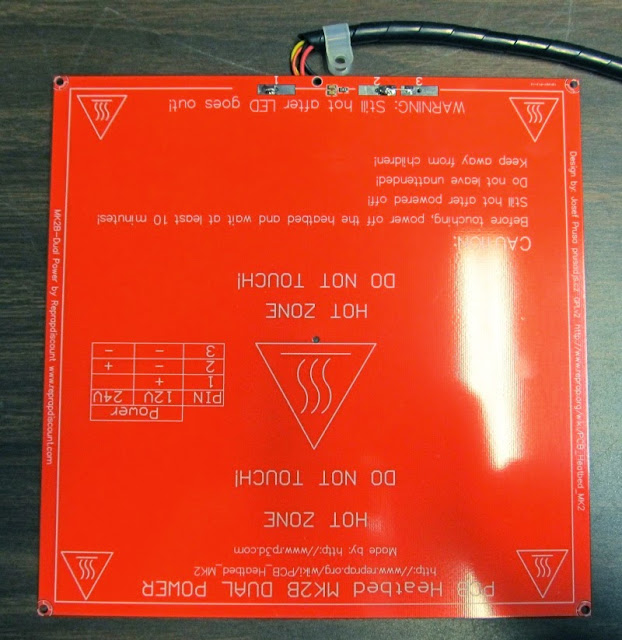
I did have regular resistors and leds, but none of surface mount resistors and leds, I did have some scrap PCB boards from computer junk, so I used a hot air rework station and removed the parts I needed, I used a 1kΩ SMD resistor, with the marking of "102" and two small SMD leds, my guess is the size is "0805".

I used a 100K ohm thermistor, PTFE Sleeving on the thermistor leads, then heatsrink covering were I soldered wires to the thermistor leads, then covered with Kapton Tape.
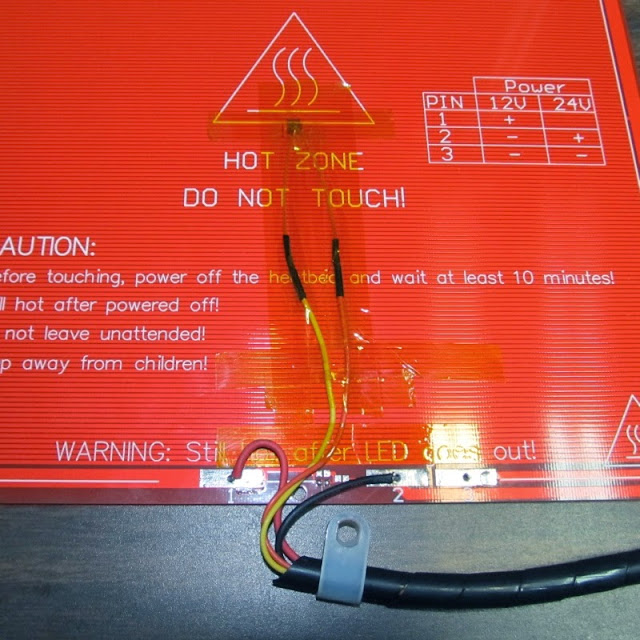
Still figuring out the wiring.
I decided on using the heatbed with the traces pointing down.
I did have regular resistors and leds, but none of surface mount resistors and leds, I did have some scrap PCB boards from computer junk, so I used a hot air rework station and removed the parts I needed, I used a 1kΩ SMD resistor, with the marking of "102" and two small SMD leds, my guess is the size is "0805".
I used a 100K ohm thermistor, PTFE Sleeving on the thermistor leads, then heatsrink covering were I soldered wires to the thermistor leads, then covered with Kapton Tape.
Still figuring out the wiring.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Thu Mar 27, 2014 2:54 am
by will1384 » Thu Mar 27, 2014 2:54 am
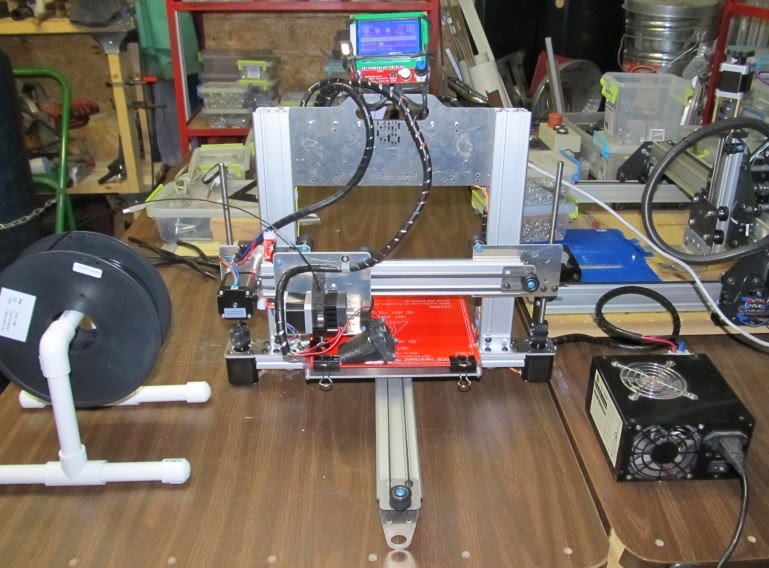
I got it to print today, I will cover the software and firmware details later, but I want to show off some images first 
I used this:
http://www.thingiverse.com/thing:266170
to mount Ramps
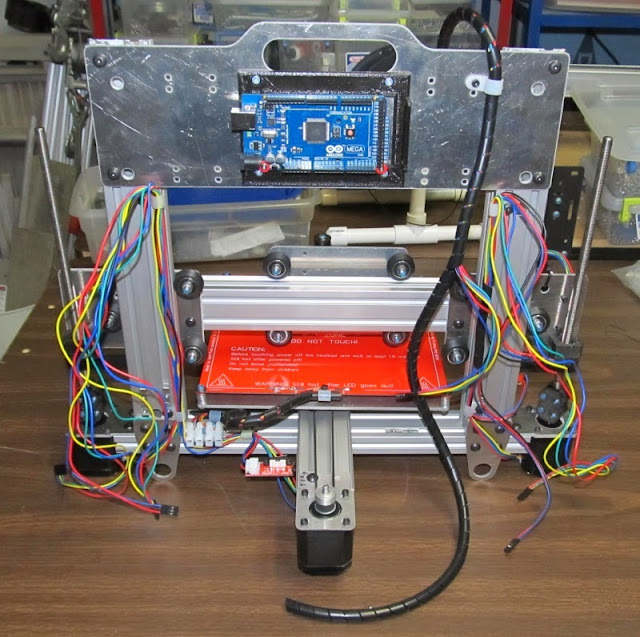
I had to drill a hole in the MBE Extruder mounting plate, and use two washers to make up the space for the nut I removed.

I used some barrier strips, nylon cable clamps and spiral wrap to clean up the wiring.
I used a volt meter to adjust the motor current, I set my StepStick A4988 drivers to VREF = 1.6, and have heat sinks installed with thermal adhesive.
http://reprap.org/wiki/StepStick
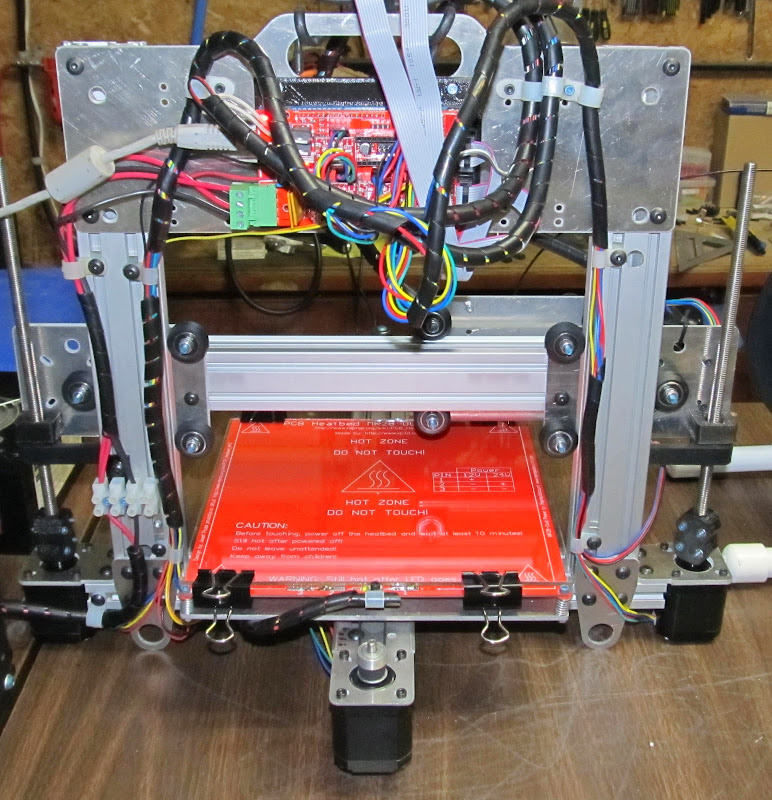
I like the Full Graphic Smart LCD Controller it helps to be able to see the temperature and control the 3D printer without the computer, later I want to print an enclosure for the LCD, I am using a flexible phone holder for the LCD now.
For the MBE Extruder v9 I am using
This fan mount:
http://www.thingiverse.com/thing:44963
and this fan duct:
http://www.thingiverse.com/thing:30721
and this extruder mod, with a PTFE lined Barrel, and MK7 Drive gear.
http://www.thingiverse.com/thing:43411
http://www.mastersketchup.com/qubd-extruder-jam-fix/
http://www.buildlog.net/wiki/doku.php?id=ord_bot:qu-bd_extruder_improvements
I used this:
http://www.thingiverse.com/thing:266170
to mount Ramps
I had to drill a hole in the MBE Extruder mounting plate, and use two washers to make up the space for the nut I removed.
I used some barrier strips, nylon cable clamps and spiral wrap to clean up the wiring.
I used a volt meter to adjust the motor current, I set my StepStick A4988 drivers to VREF = 1.6, and have heat sinks installed with thermal adhesive.
http://reprap.org/wiki/StepStick
I like the Full Graphic Smart LCD Controller it helps to be able to see the temperature and control the 3D printer without the computer, later I want to print an enclosure for the LCD, I am using a flexible phone holder for the LCD now.
For the MBE Extruder v9 I am using
This fan mount:
http://www.thingiverse.com/thing:44963
and this fan duct:
http://www.thingiverse.com/thing:30721
and this extruder mod, with a PTFE lined Barrel, and MK7 Drive gear.
http://www.thingiverse.com/thing:43411
http://www.mastersketchup.com/qubd-extruder-jam-fix/
http://www.buildlog.net/wiki/doku.php?id=ord_bot:qu-bd_extruder_improvements
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Fri Mar 28, 2014 2:30 am
by will1384 » Fri Mar 28, 2014 2:30 am
For my "Configuration.h" I will just show the lines I changed from default, it is working, but I am also sure that some of it is wrong.
This sets the name, and is displayed on the LCD, however needs to be kept short else you will run into errors.
I have a "100k Honeywell thermistor 135-104LAG-J01" on my hotend and a "100k thermistor" on my hotbed.
I did the PID Tuning described here :
http://reprap.org/wiki/PID_Tuning
You start with a cold extruder nozzle and enter this command for the extruder
it will run a few times and then tell you its finished, you then take the numbers it gives you and put then into your configuration.h, this is what that command gave me:
you do the same for the heatbed with this command
and this is what it gave me:
and this is what I put into my Configuration.h
I am still not sure on the end stops, but its working.
This sets the print area size, I used the Smart Controller LCD to move the Ord Bot in its different axises to better determine their size, I limited the X and Y axis size for bed clips.
I used this page as a reference:
http://www.buildlog.net/wiki/doku.php?id=ord:software
and used this calculator
http://calculator.josefprusa.cz/#steppers
and this page is helpful for the extruder calibration:
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
The settings I used are for GT2 belts and pulleys, and I did the extruder calibration with Mach3 and got 48.62080224 at 1/8 stepping, so at 1/16 it should be 97.24160448, I think.
And this for the RepRapDiscount Full Graphic Smart Controller
http://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller
If any one sees any mistakes please tell me, thanks.
I got the ideas for the Configuration.h settings from the different places that sell the ORD Bot, like
http://www.automationtechnologiesinc.com/products-page/3d-printer/ord-bot-hadron-3d-printer-kits
and
http://www.buildlog.net/wiki/doku.php?i ... he_ord_bot
I looked over the Configuration.h files and settings, and added what I knew about my own setup.
I used a mix of a few different pages to help setup the software and firmware
I got the Marlin firmware from
https://github.com/ErikZalm/Marlin
Here is a nice tutorial on software and firmware install
http://www.nextdayreprap.co.uk/arduino-driver-installation-reprap-prusa-mendel-build-manual-mega-2560/
This page has some nice videos and settings for Cura.
http://www.punchtec.com/software/
This page has links to files and setting that are useful.
http://www.tool3d.net/index_files/Tool3DSupport.htm
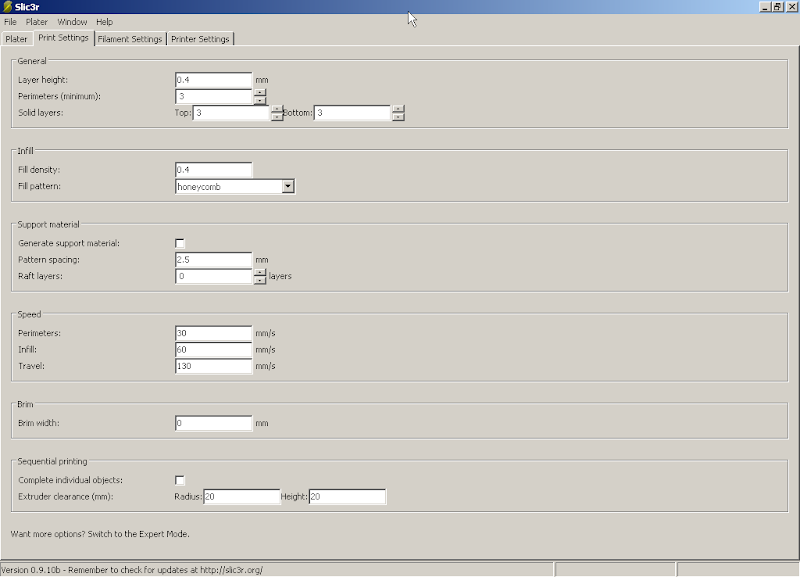
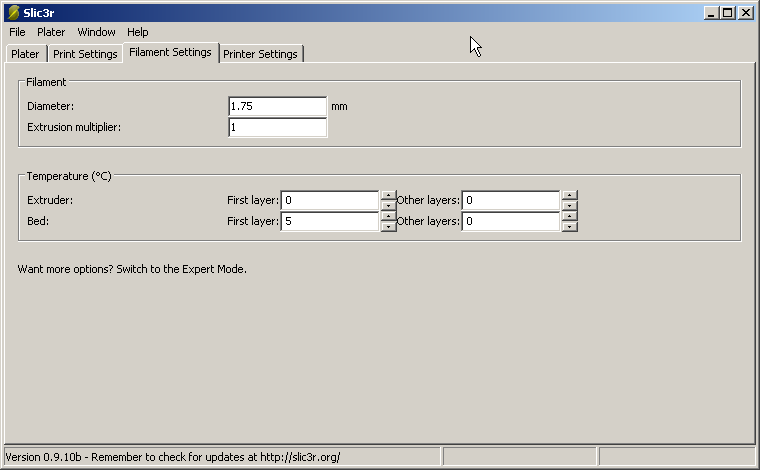
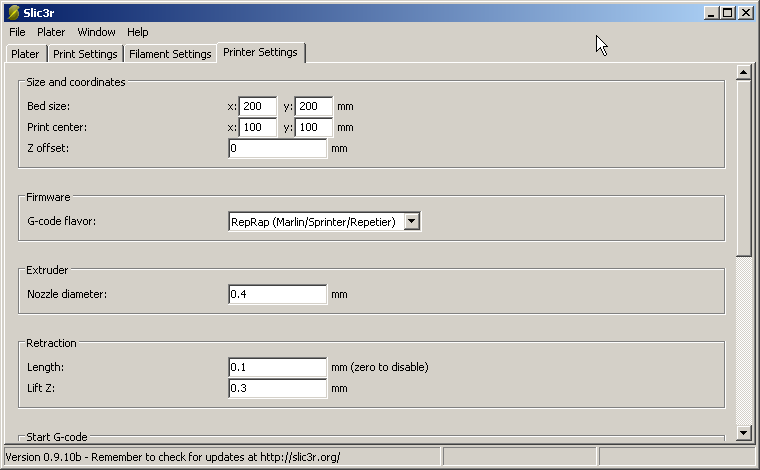
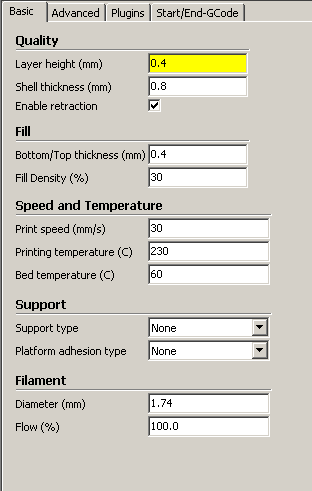
Here are my Slic3r settings, they were left over from my Shapeoko 2 3D printing, and I am sure there are errors, but the settings do work.
I started with
http://www.tool3d.net/index_files/Tool3DSupport.htm
and
http://www.punchtec.com/software/
for help with Cura.
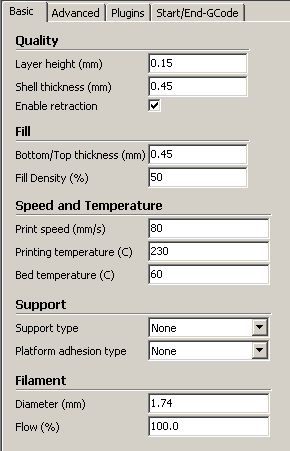
Here are my Cura settings.
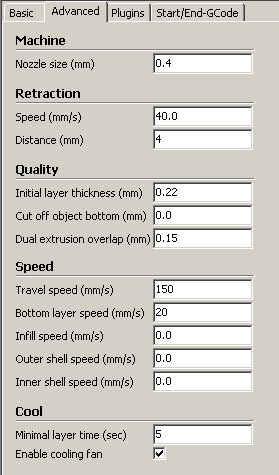
I am still trying to customize the start and end GCode settings.


The "Layer height" setting on both programs is determined by your Z-Axis setup and nozzle hole size, you need to have a layer height setting that gives you even numbers for the steps of you Z-Axis setup, the Ord Bot uses M8x1.25mm threaded rod, and most of us are using 16x micro stepping with a 200 step motor, that’s
16 * 200 = 3200
3200 / 1.25 = 2560
so now you can check the layer height against your Z-Axis setup, here are the good numbers I found.
2560 * 0.10 = 256
2560 * 0.15 = 384
2560 * 0.20 = 512
2560 * 0.25 = 640
2560 * 0.30 = 768
2560 * 0.35 = 896
2560 * 0.40 = 1024
2560 * 0.45 = 1152
2560 * 0.50 = 1280
2560 * 0.55 = 1408
2560 * 0.60 = 1536
Read more over at
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
I am printing at 0.40 now, the same size as my nozzle, I will try 0.20, 0.30, and 0.35 and post images.
I will update later when I learn more
- Code: Select all
// This determines the communication speed of the printer
// This determines the communication speed of the printer
#define BAUDRATE 115200
- Code: Select all
#ifndef MOTHERBOARD
#define MOTHERBOARD 33
#endif
This sets the name, and is displayed on the LCD, however needs to be kept short else you will run into errors.
- Code: Select all
// Define this to set a custom name for your generic Mendel,
#define CUSTOM_MENDEL_NAME "Ord Bot"
I have a "100k Honeywell thermistor 135-104LAG-J01" on my hotend and a "100k thermistor" on my hotbed.
- Code: Select all
//===========================================================================
//=============================Thermal Settings ============================
//===========================================================================
//
//--NORMAL IS 4.7kohm PULLUP!-- 1kohm pullup can be used on hotend sensor, using correct resistor and table
//
//// Temperature sensor settings:
// -2 is thermocouple with MAX6675 (only for sensor 0)
// -1 is thermocouple with AD595
// 0 is not used
// 1 is 100k thermistor - best choice for EPCOS 100k (4.7k pullup)
// 2 is 200k thermistor - ATC Semitec 204GT-2 (4.7k pullup)
// 3 is Mendel-parts thermistor (4.7k pullup)
// 4 is 10k thermistor !! do not use it for a hotend. It gives bad resolution at high temp. !!
// 5 is 100K thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (4.7k pullup)
// 6 is 100k EPCOS - Not as accurate as table 1 (created using a fluke thermocouple) (4.7k pullup)
// 7 is 100k Honeywell thermistor 135-104LAG-J01 (4.7k pullup)
// 71 is 100k Honeywell thermistor 135-104LAF-J01 (4.7k pullup)
// 8 is 100k 0603 SMD Vishay NTCS0603E3104FXT (4.7k pullup)
// 9 is 100k GE Sensing AL03006-58.2K-97-G1 (4.7k pullup)
// 10 is 100k RS thermistor 198-961 (4.7k pullup)
// 20 is the PT100 circuit found in the Ultimainboard V2.x
// 60 is 100k Maker's Tool Works Kapton Bed Thermistor
//
// 1k ohm pullup tables - This is not normal, you would have to have changed out your 4.7k for 1k
// (but gives greater accuracy and more stable PID)
// 51 is 100k thermistor - EPCOS (1k pullup)
// 52 is 200k thermistor - ATC Semitec 204GT-2 (1k pullup)
// 55 is 100k thermistor - ATC Semitec 104GT-2 (Used in ParCan & J-Head) (1k pullup)
//
// 1047 is Pt1000 with 4k7 pullup
// 1010 is Pt1000 with 1k pullup (non standard)
// 147 is Pt100 with 4k7 pullup
// 110 is Pt100 with 1k pullup (non standard)
#define TEMP_SENSOR_0 7
#define TEMP_SENSOR_1 0
#define TEMP_SENSOR_2 0
#define TEMP_SENSOR_BED 1
- Code: Select all
// This makes temp sensor 1 a redundant sensor for sensor 0. If the temperatures difference between these sensors is to high the print will be aborted.
//#define TEMP_SENSOR_1_AS_REDUNDANT
//#define MAX_REDUNDANT_TEMP_SENSOR_DIFF 10
- Code: Select all
// When temperature exceeds max temp, your heater will be switched off.
// This feature exists to protect your hotend from overheating accidentally, but *NOT* from thermistor short/failure!
// You should use MINTEMP for thermistor short/failure protection.
#define HEATER_0_MAXTEMP 260
#define HEATER_1_MAXTEMP 260
#define HEATER_2_MAXTEMP 260
#define BED_MAXTEMP 150
I did the PID Tuning described here :
http://reprap.org/wiki/PID_Tuning
You start with a cold extruder nozzle and enter this command for the extruder
- Code: Select all
M303 E0 S200 C8
it will run a few times and then tell you its finished, you then take the numbers it gives you and put then into your configuration.h, this is what that command gave me:
- Kp: 24.77
Ki: 1.47
Kd: 104.36
PID Autotune finished! Put the last Kp, Ki and Kd constants from above into Configuration.h
you do the same for the heatbed with this command
- Code: Select all
M303 E-1 S60 C8
and this is what it gave me:
- Kp: 106.84
Ki: 7.53
Kd: 378.90
PID Autotune finished! Put the last Kp, Ki and Kd constants from above into Configuration.h
and this is what I put into my Configuration.h
- Code: Select all
// If you are using a pre-configured hotend then you can use one of the value sets by uncommenting it
// Ultimaker
#define DEFAULT_Kp 24.77
#define DEFAULT_Ki 1.47
#define DEFAULT_Kd 104.36
- Code: Select all
#ifdef PIDTEMPBED
//120v 250W silicone heater into 4mm borosilicate (MendelMax 1.5+)
//from FOPDT model - kp=.39 Tp=405 Tdead=66, Tc set to 79.2, aggressive factor of .15 (vs .1, 1, 10)
#define DEFAULT_bedKp 106.84
#define DEFAULT_bedKi 7.53
#define DEFAULT_bedKd 378.90
I am still not sure on the end stops, but its working.
- Code: Select all
#ifndef ENDSTOPPULLUPS
// fine endstop settings: Individual pullups. will be ignored if ENDSTOPPULLUPS is defined
#define ENDSTOPPULLUP_XMAX
#define ENDSTOPPULLUP_YMAX
#define ENDSTOPPULLUP_ZMAX
#define ENDSTOPPULLUP_XMIN
#define ENDSTOPPULLUP_YMIN
// #define ENDSTOPPULLUP_ZMIN
#endif
- Code: Select all
// Disable max endstops for compatibility with endstop checking routine
#if defined(COREXY) && !defined(DISABLE_MAX_ENDSTOPS)
//#define DISABLE_MAX_ENDSTOPS
#endif
- Code: Select all
// Disables axis when it's not being used.
#define DISABLE_X true
#define DISABLE_Y true
#define DISABLE_Z true
#define DISABLE_E true // For all extruders
- Code: Select all
#define INVERT_X_DIR true // for Mendel set to false, for Orca set to true
#define INVERT_Y_DIR true // for Mendel set to true, for Orca set to false
#define INVERT_Z_DIR true // for Mendel set to false, for Orca set to true
#define INVERT_E0_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E1_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
#define INVERT_E2_DIR false // for direct drive extruder v9 set to true, for geared extruder set to false
This sets the print area size, I used the Smart Controller LCD to move the Ord Bot in its different axises to better determine their size, I limited the X and Y axis size for bed clips.
- Code: Select all
// Travel limits after homing
#define X_MAX_POS 170
#define X_MIN_POS 0
#define Y_MAX_POS 170
#define Y_MIN_POS 0
#define Z_MAX_POS 100
#define Z_MIN_POS 0
I used this page as a reference:
http://www.buildlog.net/wiki/doku.php?id=ord:software
and used this calculator
http://calculator.josefprusa.cz/#steppers
and this page is helpful for the extruder calibration:
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
The settings I used are for GT2 belts and pulleys, and I did the extruder calibration with Mach3 and got 48.62080224 at 1/8 stepping, so at 1/16 it should be 97.24160448, I think.
- Code: Select all
// default settings
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,2560,97.24160448} // default steps per unit for Ultimaker
#define DEFAULT_MAX_FEEDRATE {500, 500, 5, 45} // (mm/sec)
#define DEFAULT_MAX_ACCELERATION {9000,9000,100,10000} // X, Y, Z, E maximum start speed for accelerated moves. E default values are good for Skeinforge 40+, for older versions raise them a lot.
And this for the RepRapDiscount Full Graphic Smart Controller
http://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller
- Code: Select all
// The RepRapDiscount FULL GRAPHIC Smart Controller (quadratic white PCB)
// http://reprap.org/wiki/RepRapDiscount_Full_Graphic_Smart_Controller
//
// ==> REMEMBER TO INSTALL U8glib to your ARDUINO library folder: http://code.google.com/p/u8glib/wiki/u8glib
#define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER
If any one sees any mistakes please tell me, thanks.
I got the ideas for the Configuration.h settings from the different places that sell the ORD Bot, like
http://www.automationtechnologiesinc.com/products-page/3d-printer/ord-bot-hadron-3d-printer-kits
and
http://www.buildlog.net/wiki/doku.php?i ... he_ord_bot
I looked over the Configuration.h files and settings, and added what I knew about my own setup.
I used a mix of a few different pages to help setup the software and firmware
I got the Marlin firmware from
https://github.com/ErikZalm/Marlin
Here is a nice tutorial on software and firmware install
http://www.nextdayreprap.co.uk/arduino-driver-installation-reprap-prusa-mendel-build-manual-mega-2560/
This page has some nice videos and settings for Cura.
http://www.punchtec.com/software/
This page has links to files and setting that are useful.
http://www.tool3d.net/index_files/Tool3DSupport.htm
Here are my Slic3r settings, they were left over from my Shapeoko 2 3D printing, and I am sure there are errors, but the settings do work.
I started with
http://www.tool3d.net/index_files/Tool3DSupport.htm
and
http://www.punchtec.com/software/
for help with Cura.
Here are my Cura settings.
I am still trying to customize the start and end GCode settings.
The "Layer height" setting on both programs is determined by your Z-Axis setup and nozzle hole size, you need to have a layer height setting that gives you even numbers for the steps of you Z-Axis setup, the Ord Bot uses M8x1.25mm threaded rod, and most of us are using 16x micro stepping with a 200 step motor, that’s
16 * 200 = 3200
3200 / 1.25 = 2560
so now you can check the layer height against your Z-Axis setup, here are the good numbers I found.
2560 * 0.10 = 256
2560 * 0.15 = 384
2560 * 0.20 = 512
2560 * 0.25 = 640
2560 * 0.30 = 768
2560 * 0.35 = 896
2560 * 0.40 = 1024
2560 * 0.45 = 1152
2560 * 0.50 = 1280
2560 * 0.55 = 1408
2560 * 0.60 = 1536
Read more over at
http://richrap.blogspot.com/2012/01/slic3r-is-nicer-part-1-settings-and.html
I am printing at 0.40 now, the same size as my nozzle, I will try 0.20, 0.30, and 0.35 and post images.
I will update later when I learn more
Last edited by will1384 on Wed Apr 02, 2014 2:40 am, edited 4 times in total.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by rsm5178 » Fri Mar 28, 2014 9:49 pm
by rsm5178 » Fri Mar 28, 2014 9:49 pm
Great work. Nice to have someone a few steps ahead of my build and document everything in one place. Thank you
A+
A+
- rsm5178
- Posts: 119
- Joined: Tue Jul 23, 2013 9:57 pm
- Location: 19425
Re: will1384's Ord Bot Hadron
![]() by will1384 » Sat Mar 29, 2014 1:53 am
by will1384 » Sat Mar 29, 2014 1:53 am
I am still "fine tuning" my 3D printing skills, so I decided to print parts I needed
I printed this up:
http://www.thingiverse.com/thing:251549
and this part "Tower_V2_LCD_Frame_Insert.stl" from
http://www.thingiverse.com/thing:251714
and used Cura to make two copies and mirror them so I could mount my LCD on the left side.
Then I printed this:
http://www.thingiverse.com/thing:213852

I just printed "3DR_Pablo_LCD_button_kill.stl" , "3DR_Pablo_LCD_case_top.stl" and "3DR_Pablo_LCD_case_bottom.stl" for some reason the button was to big the first time I printed, so I scaled down the part in Cura and printed it again.
The print quality is "acceptable" but not perfect, basically if the part works its "acceptable" LOL

I used two bolts and the two "Tower_V2_LCD_Frame_Insert.stl" parts I printed to mount the LCD case to the spool holder, but I did have to drill one hole in "3DR_Pablo_LCD_case_bottom.stl", I am thinking about printing the end caps for the spool holder later, the spool does not touch the Ord Bot handle but is close.
The Lcd case top took about an hour and a half, so did the bottom, I printed the spool holder together, and it also took about an hour and a half.
I printed this up:
http://www.thingiverse.com/thing:251549
and this part "Tower_V2_LCD_Frame_Insert.stl" from
http://www.thingiverse.com/thing:251714
and used Cura to make two copies and mirror them so I could mount my LCD on the left side.
Then I printed this:
http://www.thingiverse.com/thing:213852
I just printed "3DR_Pablo_LCD_button_kill.stl" , "3DR_Pablo_LCD_case_top.stl" and "3DR_Pablo_LCD_case_bottom.stl" for some reason the button was to big the first time I printed, so I scaled down the part in Cura and printed it again.
The print quality is "acceptable" but not perfect, basically if the part works its "acceptable" LOL
I used two bolts and the two "Tower_V2_LCD_Frame_Insert.stl" parts I printed to mount the LCD case to the spool holder, but I did have to drill one hole in "3DR_Pablo_LCD_case_bottom.stl", I am thinking about printing the end caps for the spool holder later, the spool does not touch the Ord Bot handle but is close.
The Lcd case top took about an hour and a half, so did the bottom, I printed the spool holder together, and it also took about an hour and a half.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Sat Mar 29, 2014 1:58 am
by will1384 » Sat Mar 29, 2014 1:58 am
rsm5178 wrote:Great work. Nice to have someone a few steps ahead of my build and document everything in one place. Thank you
A+
Yep, just be careful using my settings, I am sure some of them are wrong, but as I learn more about using the Ord Bot I will keep updating the thread, I like to keep all the stuff I learned in one place so I can find it later if I need it.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Sun Mar 30, 2014 4:58 pm
by will1384 » Sun Mar 30, 2014 4:58 pm
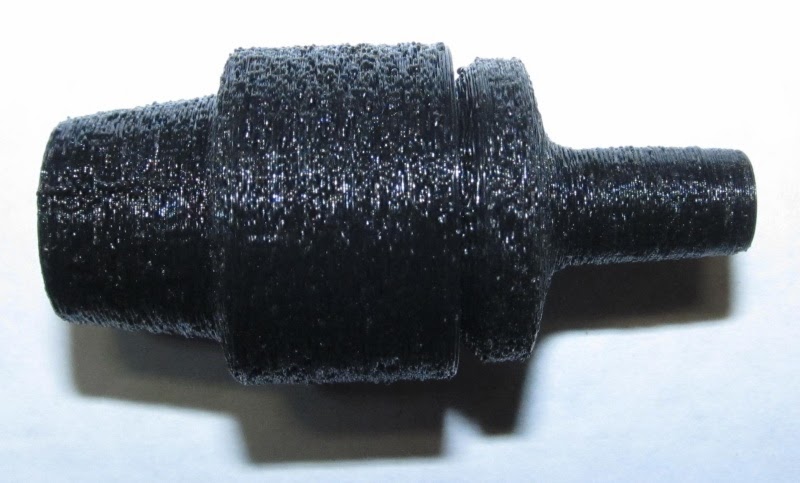
I printed this up yesterday

from this page
http://www.thingiverse.com/thing:153807
it took about 46 minutes to print with these settings
I tried to get the settings the best I could, but the part was a little rough, I did have to use a small wire brush to clean it, and to took a few tries before the two sides would screw into each other.
from this page
http://www.thingiverse.com/thing:153807
it took about 46 minutes to print with these settings
I tried to get the settings the best I could, but the part was a little rough, I did have to use a small wire brush to clean it, and to took a few tries before the two sides would screw into each other.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by will1384 » Thu Apr 03, 2014 4:00 am
by will1384 » Thu Apr 03, 2014 4:00 am
I have been trying different settings for Cura, lately I have been using the Cura print settings from
http://www.punchtec.com/software/
they seem to work well, I did change the temperature setting for my hotend, but that was about all that I changed.
I printed this

from
http://www.thingiverse.com/thing:105484
and this set of clamps
http://www.thingiverse.com/thing:30738
I also printed this handle from
http://www.thingiverse.com/thing:88131
along with the "5mm Calibration Cube Steps"
http://www.thingiverse.com/thing:24238
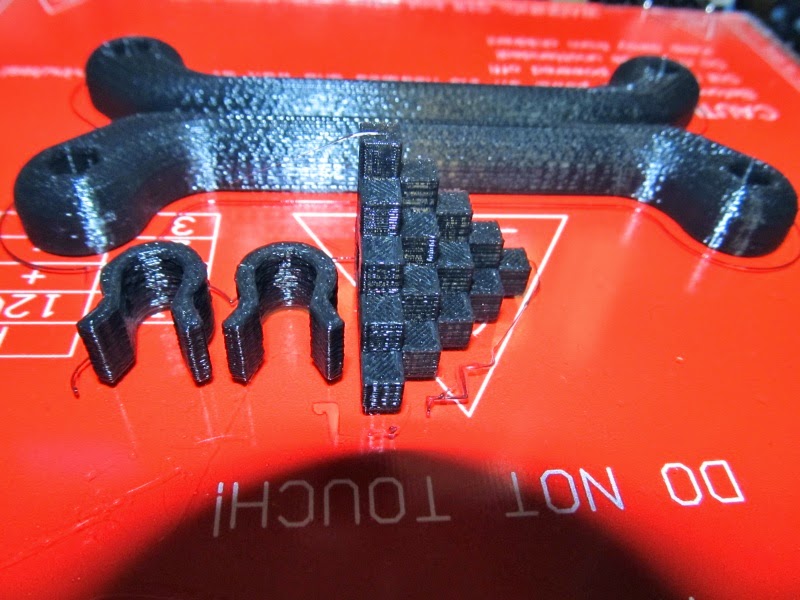
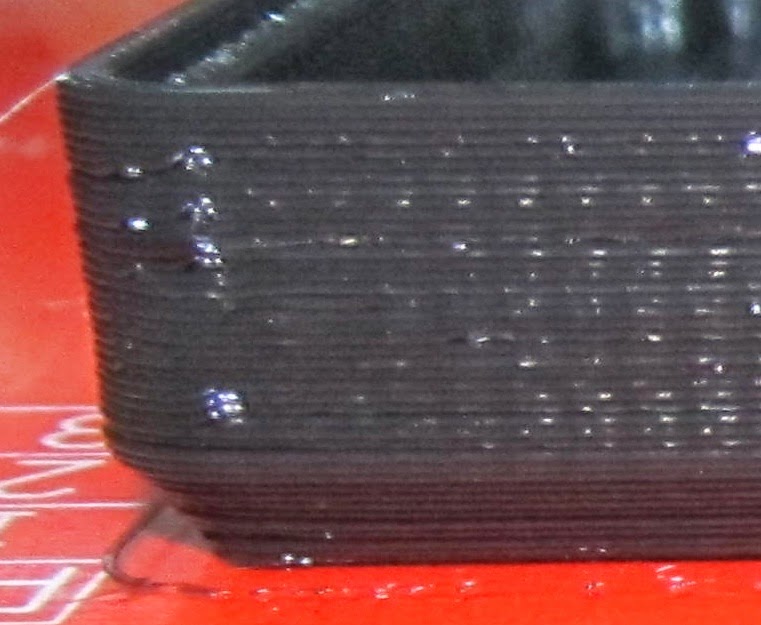
Here are close ups of the "5mm Calibration Cube Steps"
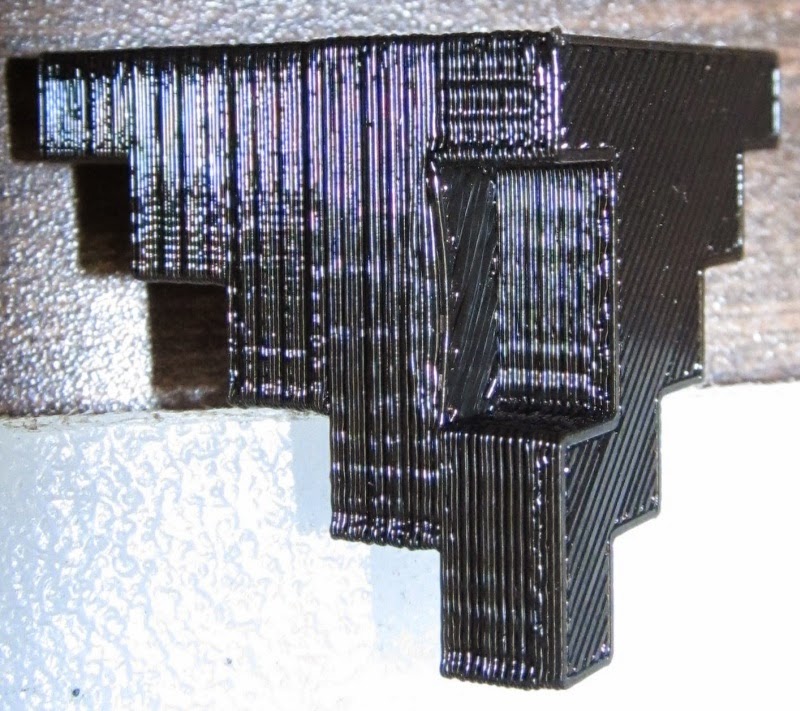

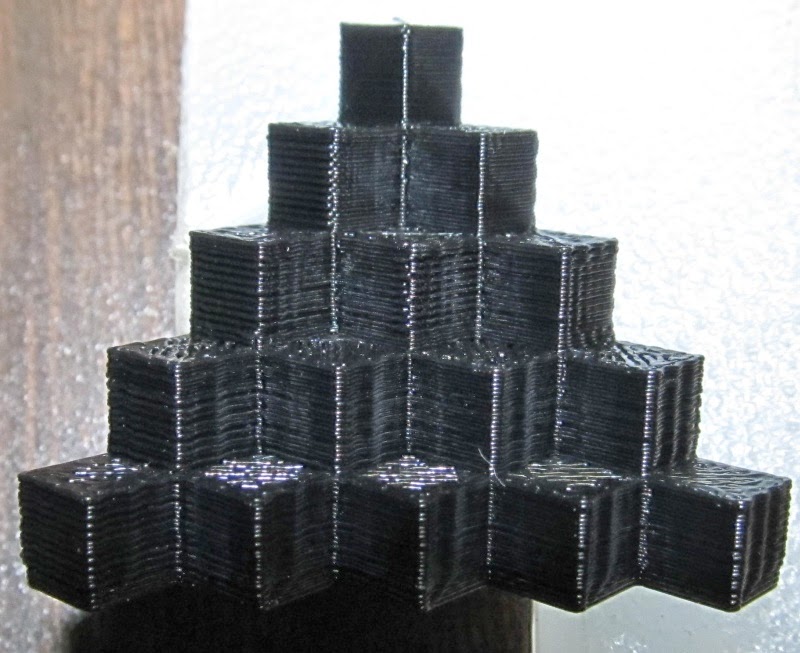
I think it looks good, but needs some tweaking.
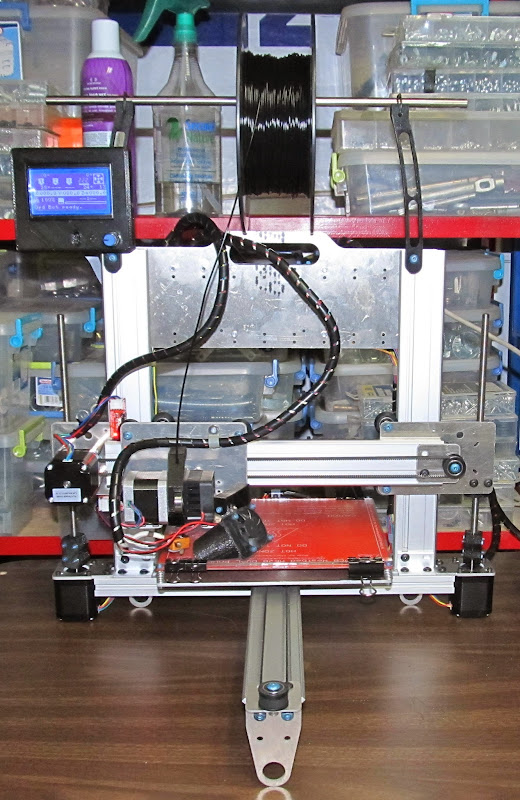
Here is my Ord Bot with the Spool holder parts I just printed installed, along with the handle, and Filament Dust Filter installed, I used a small square cut from a sponge and used a little vegetable oil.

I did have a problem using threaded rod on my spool holder, the threaded rod would slowly shift right and try to fall off the spool holder arms, the motion of the spool was slowly turning the rod, I did not have this problem with smooth non-threaded rod, so I tried this on the ends of the threaded rod

In the future I would like to "try" Ramps with bluetooth, and also figure out how have one switch to turn off the Ord Bot, right now I have to turn off the ATX power supply and unplug the USB cable to turn off the Ord Bot.
http://www.punchtec.com/software/
they seem to work well, I did change the temperature setting for my hotend, but that was about all that I changed.
I printed this
from
http://www.thingiverse.com/thing:105484
and this set of clamps
http://www.thingiverse.com/thing:30738
I also printed this handle from
http://www.thingiverse.com/thing:88131
along with the "5mm Calibration Cube Steps"
http://www.thingiverse.com/thing:24238
Here are close ups of the "5mm Calibration Cube Steps"
I think it looks good, but needs some tweaking.
Here is my Ord Bot with the Spool holder parts I just printed installed, along with the handle, and Filament Dust Filter installed, I used a small square cut from a sponge and used a little vegetable oil.
I did have a problem using threaded rod on my spool holder, the threaded rod would slowly shift right and try to fall off the spool holder arms, the motion of the spool was slowly turning the rod, I did not have this problem with smooth non-threaded rod, so I tried this on the ends of the threaded rod
In the future I would like to "try" Ramps with bluetooth, and also figure out how have one switch to turn off the Ord Bot, right now I have to turn off the ATX power supply and unplug the USB cable to turn off the Ord Bot.
- will1384
- Posts: 35
- Joined: Sat Mar 15, 2014 10:56 pm
Re: will1384's Ord Bot Hadron
![]() by TLHarrell » Thu Apr 03, 2014 5:59 pm
by TLHarrell » Thu Apr 03, 2014 5:59 pm
I assume this to mean that you are powering your Mega from 5v on the USB? Why not wire it to 12v power from the power supply? Or is that a potential noise issue?
40w Full Spectrum Engineering 5th Gen Hobby 20"x12" w/ Rotary Engraver
South San Francisco Bay Area - Sales and Support Representative for Full Spectrum Engineering
408-47-LASER - Skype: whitelightlaser-thomas - Facebook: White Light Laser
South San Francisco Bay Area - Sales and Support Representative for Full Spectrum Engineering
408-47-LASER - Skype: whitelightlaser-thomas - Facebook: White Light Laser
- TLHarrell
- Posts: 419
- Joined: Thu Jul 28, 2011 11:30 pm
- Location: Morgan Hill, CA
Who is online
Users browsing this forum: No registered users and 33 guests